
 |
 |
 |
 |
ブログ - 最新エントリー
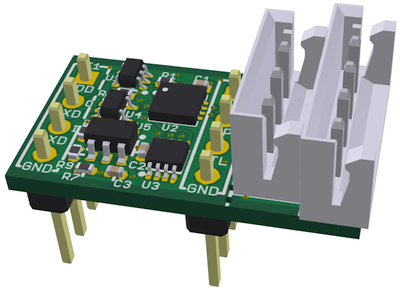
他の件にかまけて先延ばしにしていましたDXHUBの後継ですが、ようやく着手しました。
DXHUBはUSB-3WAYとコネクタの集合基板を合体させた代物でしたが、新型DXHUBは以下の構成となります。
- USB type-Cコネクタを装備
- USB 2.0 HS対応
- RS-485及びTTL I/F装備
- USBポートとDynamixel間の電源を絶縁
- Dynamixel Xシリーズ向けのJST EHコネクタ装備
- Dynamixel Xシリーズの最大通信速度に対応
- 概ね旧来のサイズを踏襲するが、残念ながら取り付け寸法は互換性無し

(左新型 右旧型)
量産版はもう少々お待ちいただく代わりに、β版を数量限定で頒布中です。
技術
DXLIB Ver.4.2 (プロトコルV1.0用Dynamixelライブラリ)
DX2LIB Ver.2.2 (プロトコルV2.0用Dynamixelライブラリ)
従来の使い方はそのままにAPIを拡充した事により、モデル毎のコントロールテーブルの差異を殆ど意識する必要が無くなり、角度・角速度・電流といった指令やフィードバック値に関しても基本的に物理値のみを扱える様になります。
また、角度と合わせて移動角速度や移動時間を同時に指令するといったAPIも含まれていますので、複数軸を扱う場合においてもコードサイズを少なく抑える事ができます。
この追加されたAPIを使用する事で、異なるDynamixelを混在させて扱う場合であっても、IDさえ管理していればモデルの違いを殆ど意識する事はありません。
なお、弊社ではプロトコルの異なるDynamixelを混在させて運用する事を許容しませんので、プロトコル毎に個別のライブラリを用意しています。
なお、弊社ではプロトコルの異なるDynamixelを混在させて運用する事を許容しませんので、プロトコル毎に個別のライブラリを用意しています。
また、MXシリーズ以前のプロトコルV1.0対応Dynamixelにおいては、Xシリーズと同等のコードを使用できる事を念頭に置いているため、時間や速度の精度は期待はできません。
技術
TurtleBot3の2種類のプラットフォームおきまして、仕様の変更が2018年12月以降のロットに適用されています。状況としましては以下の通りとなります。
- SBCがRaspberry Pi 3 Model BからRaspberry Pi 3 Model B+に変更
- Model B用に作成したSDカードはModel B+に適用できない
Raspberry Pi 3のModelによる外観の違いは次の通りです。
| (旧来) Raspberry Pi 3 Model B |
(現行) Raspberry Pi 3 Model B+ |
 |
 |
Model Bで作成したSDカードをModel B+に適用する場合は以下の操作が必要です。
- Raspberry Pi 3 model B V1.2上でkernelをupdateする。
> sudo apt-get update
> sudo apt-get upgrade
> sudo rpi-update
その後再起動すればひとまずB+で動作するイメージが作られる。 - WiFiが動作しない場合は、こちらの手順でファームウェアを更新する。
Linux PCにて操作する必要あり。
技術
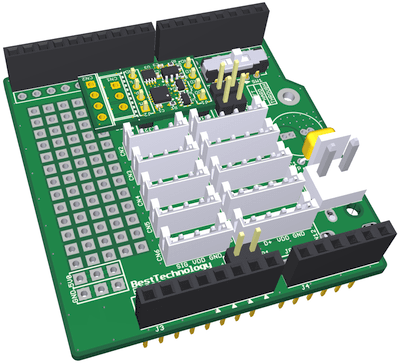
本体はこのサイズで提供する事に。お試しのレポートをよろしくお願いします。

技術
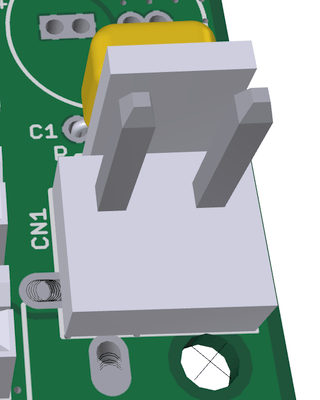
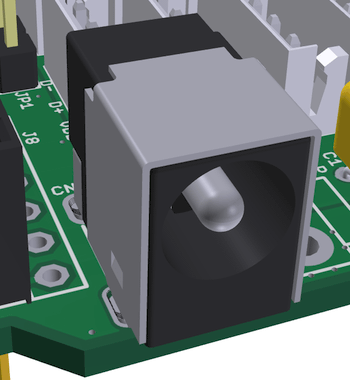
何かにつけてもコンデンサが大事、という事で今回から電源ラインに挿入する方式に。
そこまでいるのか?
はい、アンプ壊さないためはこれでも足りないぐらい。
そこまでいるのか?
はい、アンプ壊さないためはこれでも足りないぐらい。

技術
ROSロボットプログラミングバイブルに続き、新刊のお知らせです。

Arduinoを使った電子工作や各社のサーボモータの最新情報を網羅したムックが出版されます。以前出版された二足歩行ロボット関連の書籍は現在の状況と合わなくなって来ている事もありますので、ロボット向けサーボモータを初めて使ってみようとお考えの方にはこちらをお勧めします。
Arduinoを使った電子工作や各社のサーボモータの最新情報を網羅したムックが出版されます。以前出版された二足歩行ロボット関連の書籍は現在の状況と合わなくなって来ている事もありますので、ロボット向けサーボモータを初めて使ってみようとお考えの方にはこちらをお勧めします。
 |
Ohmsha ROBO-ONEにチャレンジ! 二足歩行ロボット自作ガイド 本書は、二足歩行ロボット格闘技大会「ROBO-ONE」に参加できるロボットを製作する方法を解説したものです。 基本的なロボットの構成から、サーボなど使用する部品の概要、歩行などのプログラムの作成までを解説しています。サーボの制御はArduinoを使用し、最低限歩行がきちんとできるロボットを製作します。 後半では、「ROBO-ONE」の常連参加者による、ロボット製作のノウハウの紹介が中心となります。ロボット製作のコンセプトの考え方や、格闘技の技やダンスなどの動き(モーション)をプログラムする際のコツ、ハードウェア製作のコツなど、初心者がステップアップできるだけでなく、すでに製作の経験がある方でも役に立つ内容となっています。 |
Dynamixel Xシリーズでは位置と速度を合わせたカスケード制御が行えます(MXシリーズもファーム書き換えで対応)。しかし、モーションのようにキーフレーム間の遷移時間が指定されている場合、時間を速度に変換するとアイテムの持つ分解能による誤差が気になる事があります。
黎明期から時間と速度のどちらを指定するかの議論があったのですが、MXシリーズから非接触センサを採用した事でホイール用に使用する事も多くなった事もあり、今まで速度指定が採用されていました。
最近はモデル間の電気的ないしソフト的な差異が小さくなり、ファームウェアの共通化が図られて来た事もあり、以前より要望の多かった遷移時間による位置決め制御のβテストがスタートしました。つまり、現在の位置を基準に目標位置と移動時間を指定する事が今後できるようになります。人柱になってみたい方は是非試していただいて、バグ出しに協力いただければと思います。
技術
ROSに興味があってもTurtleBotと直接的に関連する書籍が無いとお嘆きの貴兄。こんな書籍が発売されますので、ご参考にされてはいかがでしょう。
 |
Ohmsha ROSロボットプログラミングバイブル 本書は,ロボット用のミドルウェアであるROS(Robot Operating System)についての,ロボット分野の研究者や技術者を対象とした解説書です.ROSの構成や導入の方法,コマンドやツール等の紹介といった基本的な内容から,コミュニケーションロボットや移動ロボット,ロボットアームといった具体的なロボットのアプリケーションを作成する方法を解説しています. ROSについて網羅した内容となるため,ROSを使った開発を行いたい方が必ず手元に置き,開発の際に活用されるような内容です. |
Dynamixelの通信プロトコルを意識せずにコントロールテーブルへ簡便にアクセスする目的で作ったDynamixel Library(V1,V2)ですが、モデルによってコントロールテーブルの互換性が失われつつある状態では複数のモデルを一緒くたに扱いづらく、違いを意識たプログラミングを心がけないと動かないまでか重篤な事態を生じる事も起こりえました。
それらを踏まえ、以下を前提とした機能をDynamixel Libraryに追加しています。
それらを踏まえ、以下を前提とした機能をDynamixel Libraryに追加しています。
- 低層は従来のDynamixel Libraryをそのまま使用
- ユーザが意識するのはDynamixelの情報はIDのみで、多少面倒な手順操作が必要な所はライブラリ内で処理
- 基本的に予め接続されたDynamixelのモデル情報を抽出してから運用するものとし、未検出のIDに対するアクセスは以後遮蔽
- 角度・速度・電流といった物理値で指令ないし読み出し
- 動作モードはXシリーズを基準
- モデルに無い機能を使用した場合は無視
- 通信エラー等による処理のリカバリは一切行わない
また、KONDO KRS/B3MシリーズとFUTABA RSシリーズ向けに作ったライブラリにも同様のAPIを追加し、メーカに関わらずほぼ同様のコードで利用できる事も考えています。
暖かくなる頃には公開できればと。
技術
Copyright© 1989,2025 BestTechnology Co.,Ltd.