
 |
 |
 |
 |
ブログ - Dynamixelカテゴリのエントリ
大勢を占めつつあるPython、多勢に無勢というのであれば全部Pythonで書いてしまえば前準備も端折れるという事で追記しました。
ちなみにデバッグに支障があるでしょうから、例外はクラスの中ではトラップしていません。
技術

まずArduino Uno Rev3と形状が同一なので装着は可、端子機能は互換性がある、プログラムはAVRとARMの違いがあるが想定の範囲、といった程度で考えていました。
しかし電気的には問題はありませんでしたが、いざプログラムを実行してみると、ほぼ何もできない状態に直面しました。
しかし電気的には問題はありませんでしたが、いざプログラムを実行してみると、ほぼ何もできない状態に直面しました。
結果から書いてしまうと、Minima用のライブラリが過度な高い通信速度や負荷に耐えられるレベルに至っていないため、現時点では両手を挙げて使えるとは言いがたい状態でした。
昨今の初物ではありがちな状態でしたので、そのうち改修されていくものと思いますが、少なくともUARTに過度な期待をしないのが得策です。
とりあえずMinima用のライブラリを使う場合は115.2kbps以下であれば使えますし、e2stdudioでフルスクラッチすれば普通に頑張れます。
技術
様々な部品の入手性の悪さは今年も続くようで、どんな手を使っても無いものは無い訳で。
弊社でも例に漏れず製造すら再開できずに、にっちもさっちもいかず。そんな状態を漫然と待っている訳にもいかないので、手持ちの部材で最低限の機能代替が効くものをこさえる事に。
弊社でも例に漏れず製造すら再開できずに、にっちもさっちもいかず。そんな状態を漫然と待っている訳にもいかないので、手持ちの部材で最低限の機能代替が効くものをこさえる事に。

何とか早い段階で提供できればと。
技術
Dynamixel向けのライブラリを更新しました。
DXLIB Ver.4.5 (プロトコルV1.0用Dynamixelライブラリ)
DX2LIB Ver.2.8 (プロトコルV2.0用Dynamixelライブラリ)
今回はDXHATのリリースに伴いLinux環境のサポート強化と、Dynamixelの最新ファームウェアで導入されたTime-base profileを用いた指令の対応が主になります。そのついでと言ってはなんですがmacOSも対象とし、ライブラリやサンプルコードのコンパイルが多少なりとも簡便に行えるよう微調整しました。詳細は各ライブラリの更新内容を参照下さい。
なおWindows PCを使用してDynamixelの試運転からプログラムを作成し動かした気になれるところまでを網羅したDYNAMIXEL basic tutorialと題したページを作成しましたので、初めての方はそちらも参考にしてみてください。
なおWindows PCを使用してDynamixelの試運転からプログラムを作成し動かした気になれるところまでを網羅したDYNAMIXEL basic tutorialと題したページを作成しましたので、初めての方はそちらも参考にしてみてください。
技術

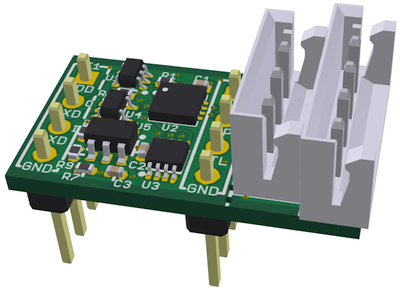
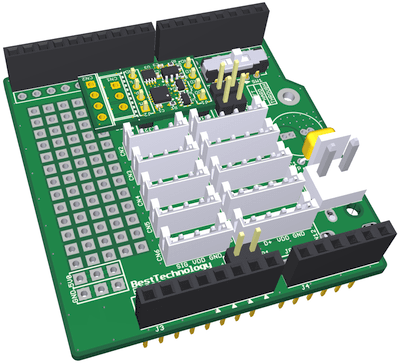
他の件にかまけて先延ばしにしていましたDXHUBの後継ですが、ようやく着手しました。
DXHUBはUSB-3WAYとコネクタの集合基板を合体させた代物でしたが、新型DXHUBは以下の構成となります。
- USB type-Cコネクタを装備
- USB 2.0 HS対応
- RS-485及びTTL I/F装備
- USBポートとDynamixel間の電源を絶縁
- Dynamixel Xシリーズ向けのJST EHコネクタ装備
- Dynamixel Xシリーズの最大通信速度に対応
- 概ね旧来のサイズを踏襲するが、残念ながら取り付け寸法は互換性無し

(左新型 右旧型)
量産版はもう少々お待ちいただく代わりに、β版を数量限定で頒布中です。
技術
DXLIB Ver.4.2 (プロトコルV1.0用Dynamixelライブラリ)
DX2LIB Ver.2.2 (プロトコルV2.0用Dynamixelライブラリ)
従来の使い方はそのままにAPIを拡充した事により、モデル毎のコントロールテーブルの差異を殆ど意識する必要が無くなり、角度・角速度・電流といった指令やフィードバック値に関しても基本的に物理値のみを扱える様になります。
また、角度と合わせて移動角速度や移動時間を同時に指令するといったAPIも含まれていますので、複数軸を扱う場合においてもコードサイズを少なく抑える事ができます。
この追加されたAPIを使用する事で、異なるDynamixelを混在させて扱う場合であっても、IDさえ管理していればモデルの違いを殆ど意識する事はありません。
なお、弊社ではプロトコルの異なるDynamixelを混在させて運用する事を許容しませんので、プロトコル毎に個別のライブラリを用意しています。
なお、弊社ではプロトコルの異なるDynamixelを混在させて運用する事を許容しませんので、プロトコル毎に個別のライブラリを用意しています。
また、MXシリーズ以前のプロトコルV1.0対応Dynamixelにおいては、Xシリーズと同等のコードを使用できる事を念頭に置いているため、時間や速度の精度は期待はできません。
技術
Dynamixel Xシリーズでは位置と速度を合わせたカスケード制御が行えます(MXシリーズもファーム書き換えで対応)。しかし、モーションのようにキーフレーム間の遷移時間が指定されている場合、時間を速度に変換するとアイテムの持つ分解能による誤差が気になる事があります。
黎明期から時間と速度のどちらを指定するかの議論があったのですが、MXシリーズから非接触センサを採用した事でホイール用に使用する事も多くなった事もあり、今まで速度指定が採用されていました。
最近はモデル間の電気的ないしソフト的な差異が小さくなり、ファームウェアの共通化が図られて来た事もあり、以前より要望の多かった遷移時間による位置決め制御のβテストがスタートしました。つまり、現在の位置を基準に目標位置と移動時間を指定する事が今後できるようになります。人柱になってみたい方は是非試していただいて、バグ出しに協力いただければと思います。
技術
Dynamixelの通信プロトコルを意識せずにコントロールテーブルへ簡便にアクセスする目的で作ったDynamixel Library(V1,V2)ですが、モデルによってコントロールテーブルの互換性が失われつつある状態では複数のモデルを一緒くたに扱いづらく、違いを意識たプログラミングを心がけないと動かないまでか重篤な事態を生じる事も起こりえました。
それらを踏まえ、以下を前提とした機能をDynamixel Libraryに追加しています。
それらを踏まえ、以下を前提とした機能をDynamixel Libraryに追加しています。
- 低層は従来のDynamixel Libraryをそのまま使用
- ユーザが意識するのはDynamixelの情報はIDのみで、多少面倒な手順操作が必要な所はライブラリ内で処理
- 基本的に予め接続されたDynamixelのモデル情報を抽出してから運用するものとし、未検出のIDに対するアクセスは以後遮蔽
- 角度・速度・電流といった物理値で指令ないし読み出し
- 動作モードはXシリーズを基準
- モデルに無い機能を使用した場合は無視
- 通信エラー等による処理のリカバリは一切行わない
また、KONDO KRS/B3MシリーズとFUTABA RSシリーズ向けに作ったライブラリにも同様のAPIを追加し、メーカに関わらずほぼ同様のコードで利用できる事も考えています。
暖かくなる頃には公開できればと。
技術
Copyright© 1989,2025 BestTechnology Co.,Ltd.